发布日期:2024-05-22 信息来源: 浙江大学机器人研究院 游览次数:1321
2024年IEEE机器人与自动化国际会议(IEEE International Conference on Robotics and Automation,ICRA)于2024 年 5 月 13 日至 17 日在日本横滨举行。ICRA会议是IEEE机器人与自动化学会(IEEE Robotics and Automation Society)的旗舰会议,是机器人技术领域最有影响力的国际学术会议之一。研究院常务副院长陆国栋教授团队发表2篇论文Bat Planner: Aggressive Flying Ball Player(研究院博士研究生于欢、硕士研究生涂杰为共同第一作者,王进教授为通讯作者)、Shape-Changing Robotic Mannequin Shoulder With Bio-Inspired Layered Structure(研究院博士研究生龙俊财为第一作者,李基拓副教授为通讯作者),并至现场参加口头与海报展示。
成果介绍1
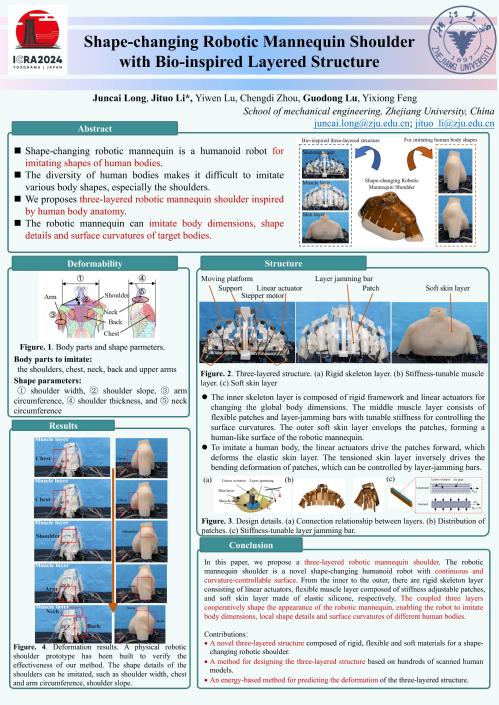
论文Bat Planner: Aggressive Flying Ball Player提出了一种四旋翼球运动系统BAT Planner (Ball plAy sysTem),旨在拦截飞行中的球并将其击打到指定的目标。
★利用扩展卡尔曼滤波对当前位置和速度估计进行正积分,并在时间分辨率下进行三次插值,计算连续梯度进行优化,从而实现球的轨迹预测。
★针对在极端情况下寻找可行的击球动作的挑战,提出了一种两阶段的规划方法,包括过渡点设计和击球原语生成,并简化了非耦合击球动作的表达。
★为了获得最佳的击球动作,提出了一种考虑动态可行性和防碰撞约束的、击球终端状态和时间成本联合优化的轨迹优化方法。
★为避免病态击打,提出了一种防御规则约束及其约束转录方法。
★与现有方法的最大区别是,本方法可以独立决策如何执行更激进的击球机动。通过大量的仿真和现实实验,证明了本方法可以将来自不同方向和距离的球击打至任意目标。
该无人机击球系统是继苏黎世联邦理工学院(ETH Zürich)Raffaello D’Andrea教授团队实现“无人机颠球”后的更大突破,使得无人机有望像人类一样在球场上对打,完成更加灵活且高机动的击球动作。

图:击球系统实验图(拍摄于浙江大学机器人研究院无人机飞行馆)
成果介绍2
论文Shape-Changing Robotic Mannequin Shoulder With Bio-Inspired Layered Structure的主要工作集中在开发和验证一种新型的可变形机器人肩部,该肩部能够模仿人类肩部的复杂形状。该研究的主要贡献如下:
★三分层仿生结构:
-骨架层: 这个内层由刚性框架和线性执行器组成,旨在调整模特的整体尺寸,如肩宽、肩厚等。刚性结构提供支撑并允许显著的形状变化。
-肌肉层: 中间层由具有可调刚度的柔性贴片组成,这些贴片受到人体肌肉的启发,可以控制肩部表面的曲率和细节。这些贴片的刚度可以通过层堵塞机制动态调整。
-皮肤层: 最外层由柔软的弹性材料制成,模仿人类皮肤。这个层包裹柔性贴片,形成一个连续的表面,能够进行各向异性的变形以复制人类肩部的曲率和质地。
★设计方法:
-该模特肩部的设计基于对数百个扫描的人体模型形状差异的分析。这种分析有助于理解人类肩部形状的变化,并为分层结构的设计提供信息。
-提出了一种基于能量的方法来预测和控制分层结构的耦合变形。该方法有助于通过平衡不同层内的力来实现期望的形状变化。
★原型制作和验证:
-构建了一个机器肩部的物理原型来测试所提设计的有效性。该原型包括所有三层结构,展示了仿形各种人体参数(如肩宽、肩坡度、手臂周长和肩厚度)的能力。
-通过一系列实验验证了原型模仿不同人类肩部形状的能力。结果表明,机器人肩部可以准确地复制各种人类模型的形状和尺寸。
★应用和创新:
-应用:这种可变形的机器人模特肩部在远程裁剪和在线服装销售中具有潜在应用。通过将服装放在机器人上并驱动其模仿目标人体,客户无需亲自试穿即可看到真实的穿衣效果。
-技术创新: 该研究在机器人设计方面实现了多项创新,包括刚性、柔性和软性材料的结合使用,以及通过能量方法控制和预测分层结构的变形。这些创新为未来的机器人设计提供了宝贵的经验和技术储备。
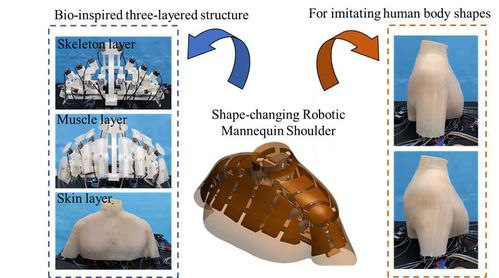
图:新型的可变形机器人肩部


copyright 2017-2029 浙江大学机器人研究院 最佳浏览效果1024*768分辨率/建议使用微软公司IE8.0或以上版本
